Projects
Some interesting projects that I have a video or picture to show.
Develop Controls for Active Suspension and Best-in-Class Software in the Loop
with over 500 DOF
Vehicle Models.
Blue: Active - Red: Passive
Control Autonomous Vehicles to Follow Trajectories and Speed Profiles by Sliding Mode Control, PID, & Torque Vectoring.
Build iOS & Android Apps using Flutter & AWS (DynamoDB, httpApi, Lambda, Fargate, SNS, CI/CD)
Analyze Handling, Ride Comfort, & Durability Loads Without Vehicle Prototypes or Data Acquisition. Accuracy > 90%
Model & Simulate Vehicles Climbing a Stair in ADAMS/Car. Challenging Off-Road Simulations
Implement Model Predictive Control For Cars to Change Lanes in Python
{kind=link}
Develop Model-Reduction Methodologies for Multibody Systems e.g. Suspension
Reduce the Number of Equations of Motion for Uncontrollable & Unobservable Systems
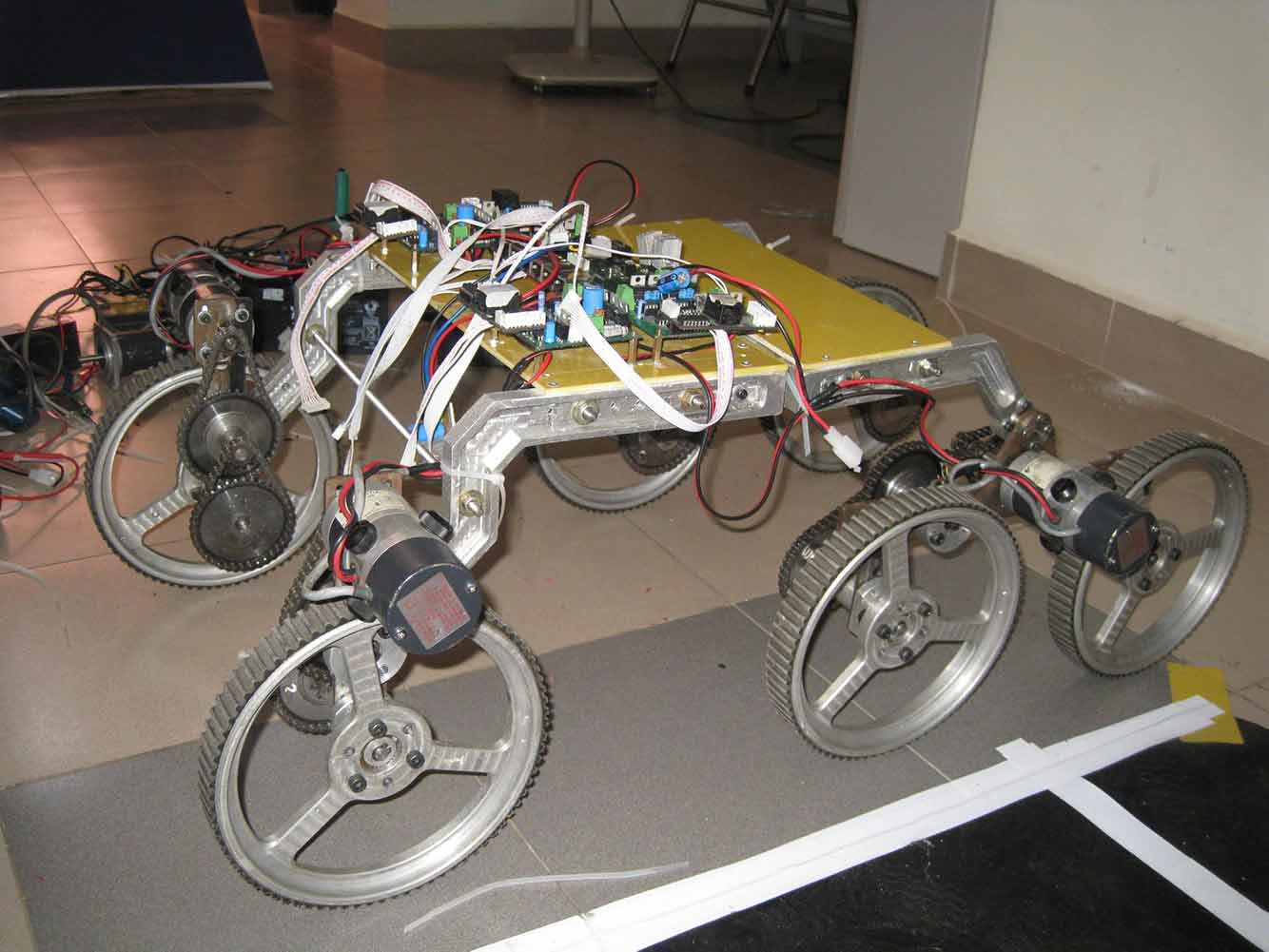
Program a Mobile Robot for All-Terrain Robots Competition

Name: Khánh Nguyen
Profile: Mechatronics Engineer & Full Stack Developer
Email: khanh.uw[at]]gmail[]dot]]com
Phone: (519) 99nine seven two 72
Skill
Vehicle Dynamics 99%About me
Meet an accomplished Mechatronics Engineer with a proven track record of spearheading diverse projects in control theories, vehicle dynamics, automatic systems, & mobile apps, showcasing my prowess in cutting-edge technologies.
My mathematical acumen shines brightly, as exemplified by the First Prize in the 16th National Mathematical Olympiad.
Proficiency in control theories, from linear (PID, Loop Shaping) to nonlinear (Sliding Mode) to optimal (LQR, Quadratic Optimization) to robust ( H∞, ADRC) to intelligent (Fuzzy Logic, Neural Network) to predictive (MPC) controls, demonstrates my mastery in refining complex systems.
Beyond engineering, I've harnessed the power of technology to craft captivating mobile apps using Flutter and AWS serverless further solidifing my grasp on creating scalable, efficient solutions.
My programming versatility spans languages like Python, C++, and C, while my engineering and research prowess, coupled with exceptional technical writing skills, underscores my holistic approach.
A collaborative spirit and imaginative approach to problem-solving define my teamwork skills. With a growth mindset and meticulous time management, I am ready to make my mark in the world of Vehicles & Robotics.
Résumé
Education
Master of Applied Science in Mechanical Engineering
Jan 2012 - Apr 2014
University of Waterloo, Waterloo, Canada
- Thesis: Model Reduction for Vehicle Systems Modelling.
- Courses: Vehicle Dynamics Systems - Dynamics of Multi-body Systems - Computational Intelligence - Applied Functional Analysis.
Bachelor of Engineering in Mechatronics with Honours & Diplôme d’Ingénieur
Sept 2005 - Jul 2010
Training Program for Excellence Engineers (PFIEV)
Ho Chi Minh city University of Technology, Vietnam
INPG Grenoble Institute of Technology, France
- GPA: 8.46 in Top 1% of The University
Honours & Awards
Graduate Research Studentship - University of Waterloo $35,000/year
2012 to 2014 - Canada
Green Belt of Design For Sig Sigma (DFSS) - Suspension Optimization for Washout Events
2018
Kaizen Recognition: Optimization for Washout Analysis
2015
Consolation Prize of Scientific-Research-Students Award from Vietnamese Education and Training Ministry
2011 - Vietnam
TOYOTA Scholarship
2009
Intel Vietnam Engineering Scholarship
2009
Masuda Scholarship
2005 to 2009
Professional Experience
Self Learning
2008 - Present
Learn from Coursera, Udemy, & others
- Cutting-Edge App Development: Engineered dynamic mobile applications utilizing Flutter (Dart/C++) for frontend and harnessed AWS Serverless for backend and CI/CD e.g. httpAPI, DynamoDB, Lambda,RESTful API, Fargate, SNS…
- Advanced Control Theory: Proficiently adept in intricate control algorithms, encompassing H∞ , Fuzzy Logic, Neural Networks, Genetic Algorithms, Model Predictive Control, & PID controllers, showcasing an in-depth understanding of dynamic system control.
- Mathematical Excellence: Achieved First Prize in the renowned 16th National Mathematical Olympiad in Vietnam in 2008 (Vietnam consistently ranks within the top seven nations at the International Mathematics Olympiad (IMO)), showcasing exceptional proficiency in mathematics.
- Enhanced Expertise in Programming & Debugging: Demonstrates adeptness in a wide spectrum of programming languages and frameworks including Python, C++, C, JavaScript, VBA, and SQL. Proficiently employs potent libraries like Scrapy, Selenium, NumPy, & Scikit-learn to craft efficient and groundbreaking solutions.
- Innovative Robotics Expertise: Developed a method to control a mobile robot to follow any given trajectories in 2009. Built & programmed a mobile robot for the All-terrain Robots Competition in 2009 as a team captain. Crafted and engineered mobile robots, automated storage and retrieval systems (ASRS), and automated conveyors using cutting-edge technologies such as Arduino, PLC.
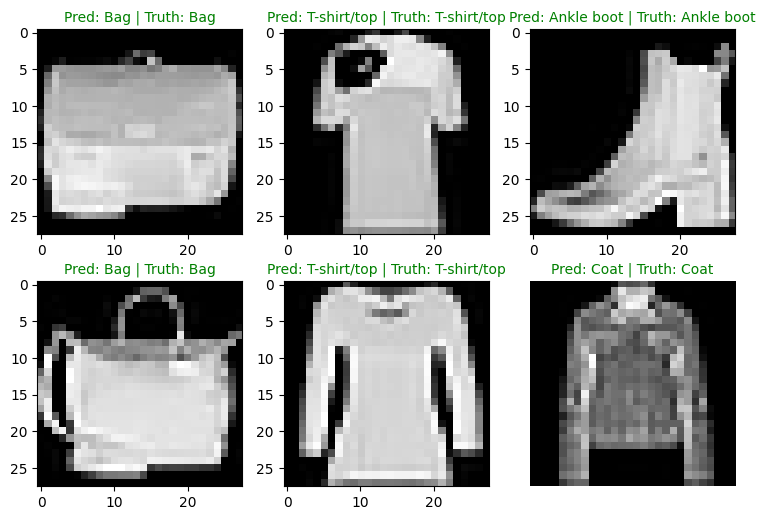
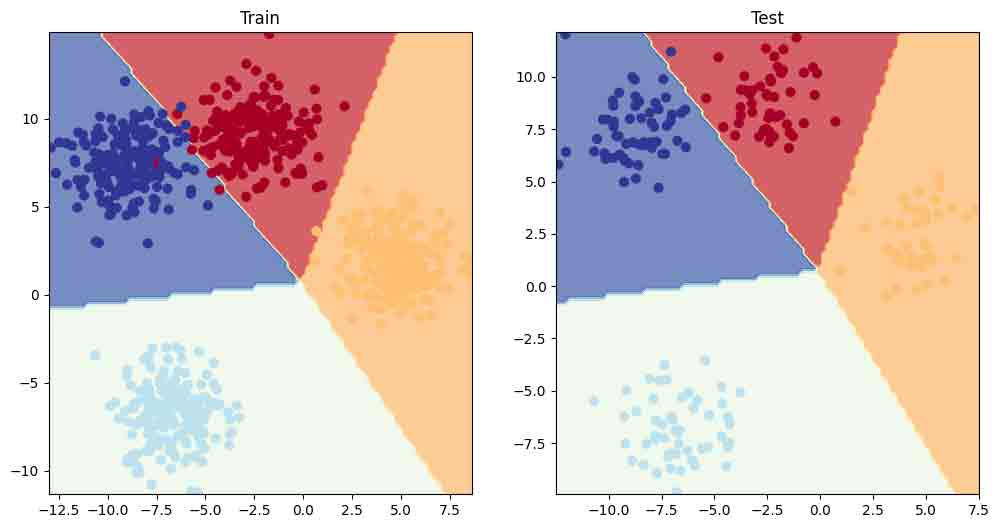
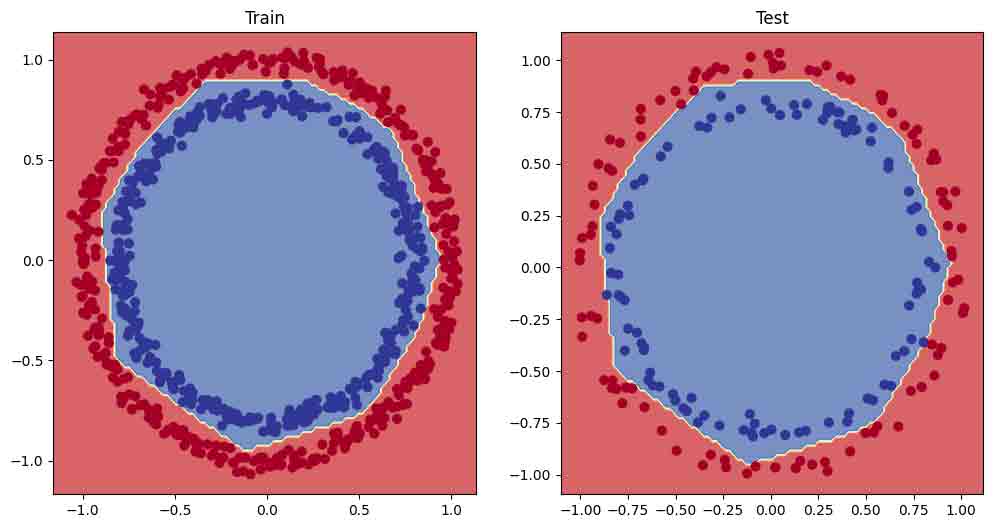
- Deep Learning/AI Enthusiast: Mastered the foundational principles of deep learning through rigorous coursework with Prof. Andrew Ng on Coursera, encompassing Neural Networks & Deep Learning, Convolutional Neural Networks, and Natural Language Processing. Proficient in deriving core equations like Forward & Backward Propagation.
Chassis Development Engineer - Ford Motor Company
2023 - Present
Dearborn, MI, US
- High Voltage Active Suspension: developing control algorithms by using H∞, LQR, Skyhook, Groundhook, Fuzzy Logic, Sliding Mode Control, Active Disturbance Rejection Control, Backstepping Control...
- Steer By Wire & Tertiary Lateral Control: developing controllers for rack/pinion motion, driving torques, & brake torques...
- Best-in-Class Software in the Loop: building SiL with the high fidelity to rapidly and efficiently evaluate control algorithms for active suspension and lateral controls by leveraging ADAMS/Car and Simulink.
Multi-body Dynamics Engineer - Stellantis N.V.
2014 - 2023
Windsor, Ontario, Canada
- Developed Innovative Methodology: Spearheaded the development of the groundbreaking "Virtual Road Load Data Acquisition" (vRLDA) methodology. This pioneering approach revolutionized vehicle design, testing, and optimization by simulating complete vehicles digitally at Chelsea Proving Grounds. This innovation eliminated the need for physical prototypes and data acquisition while comprehensively assessing vehicle dynamics, handling, ride comfort, durability loads, and design improvements.
- Advanced Controller Integration: Integrated complex controllers into virtual full-vehicle models, including trajectory tracking, throttle & braking control, ABS, & Adaptive Damping System. Achieved seamless synergy between Matlab/Simulink & ADAMS/Car co-simulation, enhancing the precision of dynamic simulations.
- Comprehensive Multi-body Modeling: : Leveraged MSC ADAMS/Car, Altair MotionView, & nCode to meticulously construct full-vehicle models encompassing rigid and flexible components, ranging from suspensions, steering, and brakes to powertrain, cab, & frame. Demonstrated profound insight into vehicle dynamics and performance & Achieved an intricate representation of diverse Stellantis vehicle platforms.
- Proven Production Application: Successfully implemented vRLDA in production environments, resulting in exceptional correlations between simulation outcomes and measurements from real-world testing at Chelsea Proving Ground, Arizona Proving Grounds, and public roads.
- Strategic Suspension Optimization: Employed Design for Six Sigma methodologies in conjunction with vRLDA to optimize the suspension design for demanding washout events.
- Efficiency-Driven Scripting: Pioneered the creation of Python, C Shell, and VBA scripts, automating post-processing tasks and data engineering processes. Demonstrated an innovative mindset in optimizing workflows.
- Cross-Functional Collaboration: Collaborated seamlessly with diverse teams including design, release engineering, vehicle dynamics, test engineering, and FEA, fostering the development and optimization of cutting-edge platforms such as the 2021 Jeep Grand Wagoneer and the 2023 Ram 1500 REV.
- Mentorship and Team Collaboration: Empowered and motivated incoming members of the loads group through a collaborative growth mindset, fostering an environment of shared advancement.